
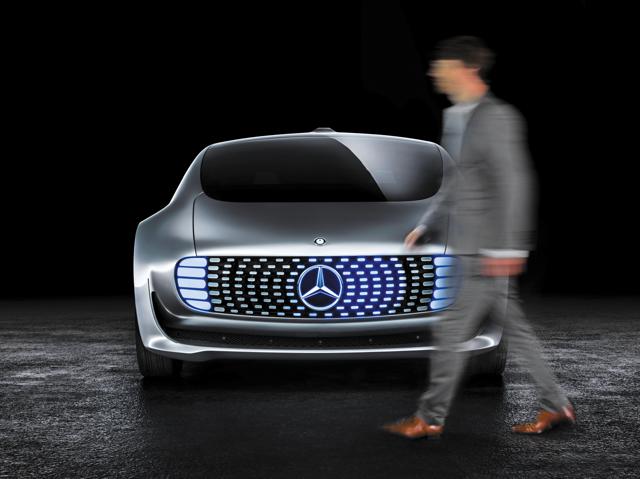
Estamos en Alameda Point, un antiguo complejo de la armada norteamericana situado junto a San Francisco, en California. Es un recinto enorme. Antaño, contaba con su propio aeropuerto –con dos pistas de aterrizaje– y astilleros lo suficientemente grandes como para construir el portaviones Coral Sea. Hoy, todo eso es una extensión llana de cemento que llega hasta el horizonte… casi literalmente. En una esquinita, Mercedes ha levantado un coqueto edificio prefabricado de una sola altura que cuenta con un porche de madera y hasta con una bonita pérgola. Guarecido bajo la pérgola, aguarda un vehículo extraño. Tiene puertas y ventanillas, aunque distinguirlas requiere unos segundos de proceso mental, porque está completa y concienzudamente pintado en color gris metalizado. Se trata del Mercedes F 015: la interpretación que hace Mercedes sobre cómo podrían ser los primeros coches autónomos, una fantasía que podría volverse real hacia el año 2035.
Coches autónomos. ¿Todo el mundo tiene uno?
–»No sé si lo he entendido bien, pero juraría que me acaban de pedir que me suba al porche para que no me atropelle el vehículo autónomo», comenta en voz baja y con gesto de profundo desconcierto un colega. No, no se trata de ningún malentendido. De hecho, nos lo han pedido a todos, discretamente. Y hay más: Matthias Brock, enlace con la prensa del departamento de I+D, me acaba de confirmar qué clase de funcionalidad autónoma ofrece el F 015: «Ninguna en absoluto». Y es que, en realidad, el F 015 –como buen prototipo– apenas dispone de lo necesario para autopropulsarse, a una velocidad de unos 30 km/h, a lo largo de un recorrido prefijado y controlado mediante GPS. «Si montaramos los ordenadores para hacerle autónomo, no cabrían los pasajeros», me aclara Matthias. ¡Houston, tenemos un problema!
Segunda parada, Enrique Aguirre, director de comunicación de Mercedes para España. –»Enrique, tengo un problema. El coche que hay ahí fuera no es autónomo. Y yo necesito volver a España sabiendo perfectamente cómo funciona un Mercedes autónomo». En estos casos, si tienes suerte, transcurridos unos minutos te presentan a un becario experto –pero imprudente– que ni sospecha el ritmo al que se dispara, con cada palabra que dice, la probabilidad de acabar despedido. No es el caso: Enrique regresa con Herbert y Axel. El profesor Dr. Herbert Kohler es vicepresidente de Daimler AG para Investigación y Sostenibilidad. Axel Gern es el director de Vehículos Autónomos del centro de I+D de Mercedes-Benz para Norteamérica.
–»Vale, y… ¿qué quieres saber sobre coches autónomos?»
–»Todo».
Desde 2013, Mercedes tiene un coche autónomo. Oficialmente, es el S 500 Intelligent Drive. Oficiosamente, se llama Bertha, como la mujer de Karl Benz. Bertha comenzó rodando solita en Alemania, y ahora está en EE.UU., donde le están mejorando y adaptando ligeramente para desenvolverse en estas carreteras.

Aprendiendo a conducir, capa por capa
Para entender cómo funciona Bertha, tenemos que empezar repasando de qué sensores dispone. El modelo de partida es un S 500 con Distronic Plus –así se llama el control de crucero adaptativo de Mercedes–, que cuenta con cuatro radares de corto alcance en las esquinas de los paragolpes, un radar delantero de largo alcance y una cámara estereoscópica frontal. Sobre eso, Mercedes ha añadido: una cámara monocular en color con 4 Mp de resolución –para la detección de los semáforos–; una cámara estereoscópica como la delantera, pero mirando hacia atrás; un radar de largo alcance a cada lado –para detectar tráfico en cruces de carretera–; y un radar trasero de largo alcance –para vigilar el tráfico que se aproxima por detrás–. Mercedes no ha querido comentar el sobrecoste de estos sensores, aunque podrían adquirirse como respuestos por unos 1.500 euros.
Conseguir un coche autónomo requiere resolver una serie de problemas particulares que los ingenieros confinan en unos espacios conceptuales llamados capas. Son capas porque cada problema se apoya, metafóricamente, en el problema inferior, más sencillo… y juntas funcionan como un equipo para resolver el problema inicial: un coche que conduce solo.

 Capa de localización
Capa de localización
Permite que el coche autónomo sea consciente de su ubicación… con exactitud. Podría pensarse que el GPS logra solucionar este problema… pero eso no es así en absoluto. Incluso utilizando un GPS muy caro, o combinando varias redes de satélitres –como GPS y GLONASS–, el error en entornos urbanos es superior a un metro: suficiente como para chocar contra otro coche o contra el decorado. Aunque el GPS no sirve, ayuda: al menos, sabemos en qué calle estamos y a qué altura. Y, al fin y al cabo, emplear unos satélites a 22.000 km de distancia cuando estamos rodeados de puntos de referencia más convencionales, no tiene sentido.
Aquí, en esta primera capa, la de localización, es donde entra en juego el mapa detallado y donde el enfoque de Mercedes marca la diferencia. A la hora de localizar esos puntos de referencia, cuya posición exacta viene anotada en un mapa detallado, todos los coches autónomos que hemos conocido hasta ahora emplean escáneres láser. Estos aparatitos han sido, y son, la solución para la capa de localización desde que Sebastian Thurn y su equipo de la universidad de Stanford los usaran por primera vez allá por 2005. Y por un motivo muy simple: con un escáner láser es posible desde ver las líneas de carril –porque reflejan el láser con mucha intensidad– a detectar la posición exacta de los bordillos, las farolas, las fachadas de las casas y cualquier otra cosa que queramos utilizar como hito –que es el nombre técnico de estas estructuras inmóviles que se usan como referencia para posicionarse–.
El problema con los escáneres láser es que son dispositivos ópticos de precisión. Y eso se traduce en que existe cierto umbral de coste que tal vez nunca se pueda rebajar. Ahí está la gracia del Bertha: Mercedes no ha empleado ningún escáner láser para resolver la capa de localización. Han resuelto el problema utilizando exclusivamente visión artificial y sensores de radar similares a los que equipan en sus coches de serie. Hoy en día, estos sensores son bastante caros, pero sabemos que, en un futuro, se podrán fabricar a precios casi ridículos –ver arriba–.
Aunque hacerlo no debe de haber sido fácil. A diferencia de un escáner láser, que proporciona una nube de puntos tan precisa que los objetos son perfectamente reconocibles –de forma que usarlos para ubicarse es casi una cuestión intuitiva–, la señal que capta un radar es un diagrama bastante incomprensible. Es decir, aunque las imágenes que capta un radar son muy consistentes –algo siempre tiene el mismo ´aspecto´–, no son inteligibles, de forma que si quieres usar radar para detectar tu posición relativa respecto de tus hitos con exactitud, primero tienes que aprender el aspecto exacto que, desde el punto de vista de un radar, tienen tus hitos.
Afortunamdaente, parece que el mundo está lleno de estructuras que devuelven un eco de radar muy característico. Muchas, tienen en común una geometría particular: la intersección de dos o tres superficies perpendiculares. Y, aunque no han querido sugerirnos muchos ejemplos, Axel asegura que, vistos por un radar, las aristas de los bordillos, las farolas o, por ejemplo, las esquinas de los marcos de aluminio de las ventanas… resplandecen.
Capa de obstáculos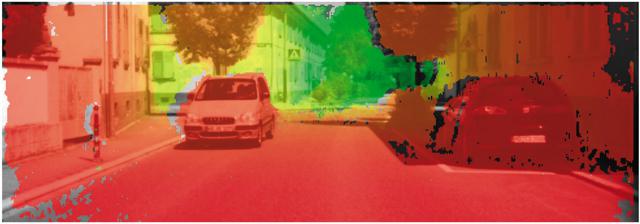
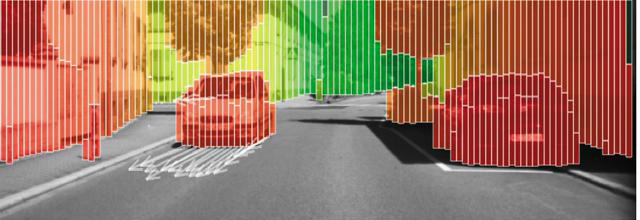
Resolver la capa de localización nos ubica sobre el plano con una precisión inferior a 10 centímetros –de en torno a 3 cm, en el mejor de los casos–, de forma que ya podemos pensar en movernos. No obstante, antes hay que resolver la capa de obstáculos, cuya función es decidir sobre qué partes de lo que tenemos delante podemos rodar y sobre cuáles no. Para solucionar esta capa, Mercedes parte de la información de la cámara estereoscópica, que es capaz de medir a qué distancia se encuentran las cosas que ve: esta cámara mide la distancia a los objetos en alrededor de 400.000 puntos, y a un ritmo de 25 fotogramas por segundo. Actualmente, existen procesadores como el Nvidia Tegra X1 que serían capaces de procesar esa información en tiempo real, pero es innecesario. Mercedes se ha inventado unas entidades llamadas Stixel: consisten en unos finos rectángulos verticales que salen del asfalto y que actúan como vallas virtuales. Todo lo que no es suelo, es rodeado por Stixels.
Si te estás moviendo –o el obstáculo se está moviendo–, en el siguiente fotograma los Stixels aparecerán levemente desplazados. Eso delata al obstáculo, porque ahora ya sabemos qué Stixels pertenecen a él, hacia dónde se está desplazando y a qué velocidad lo está haciendo. Además, los radares nos permiten detectar peatones hasta a unos 40 metros y coches a unos 200 metros de distancia, y distinguir entre coches, motos, bicis y peatones. Combinando ambas informaciones, ´segmentamos´ lo que aparece en la imagen. Es decir, identificamos cuántas cosas independientes estamos viendo y qué estan haciendo.
 Capa de señalización
Capa de señalización
Ahora que sabemos dónde estamos, qué nos rodea y sobre qué zonas del mapa están despejadas y son transitables, se acerca el momento de empezar a movernos. Pero antes, hay que procesar la capa de señalización. Consiste, sobre todo, en averiguar la fase en la que se encuentran los semáforos, aunque tambien se comprueba que las señalización concuerda con la de nuestro plano detallado. Según Mercedes, el asunto de los semáforos es muy delicado. Si se trata de un semáforo ´conocido´ –es decir, documentado en el mapa detallado–, no supone un problema. Pero la identificación de semáforos nuevos no es infalible: si el semáforo es ´difícil´ de ver, existe entre un 20% y un 30% de probabilidades de saltárselo.
Capa de planificación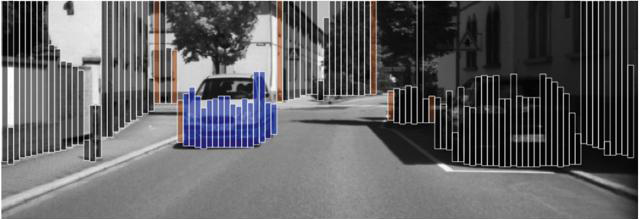
Esta capa tiene dos cometidos: deducir qué piensa hacer el resto de vehículos… y decidir qué va a hacer nuestro coche. En el caso de Bertha, esta capa piensa en términos de una unidad llamada el lanelet. Un lanelet es un segmento de vía que sólo tiene una entrada y una salida. Una vía es siempre una sucesión de lanelets pero, por ejemplo, cuando hay una bifurcación, existen una zona de vía que pertenece a dos lanelets diferentes: el lanelet que se bifurca a la derecha y el que se bifurca a la izquierda. Bertha asume sabe que no es bueno que dos vehículos circulen al tiempo por dos lanelets distintos que comparten el mismo tramo de vía… porque eso puede conducir a dos coches tratando de ocupar el mismo lugar físico. Mercedes llama a esto ´conducción defensiva´, y es la base del comportamiento antichoque de Bertha. Además, Bertha está programada para ser muy cortés y, a diferencia de un humano, nunca trata de forzar a otros coches a cambiar de lanelet haciendo valer derechos de prioridad de paso.
 Capa de ejecución
Capa de ejecución
Finalmente, por fín llegan instrucciones sobre en qué dirección y a qué velocidad debe moverse Bertha a la capa que conduce el coche. Cada pasito suele consistir en avanzar menos de medio metro, y las acciones de mando teóricas tienen que ser continuamente matizadas para compensar todo tipo de detalles –el viento, el peralte, los adoquines…– que alejan la trayectoria real de Bertha de la teórica. A bordo, lo que se percibe es un movimiento fluído y sin muchos titubeos. No es tan ágil como un conductor profesional, desde luego. Pero no creo que merezca la pena preocuparse demasiado por eso. Al fin y al cabo, Mercedes piensa invertir los próximos 20 años en pulir los detalles…
Un problema…tres soluciones
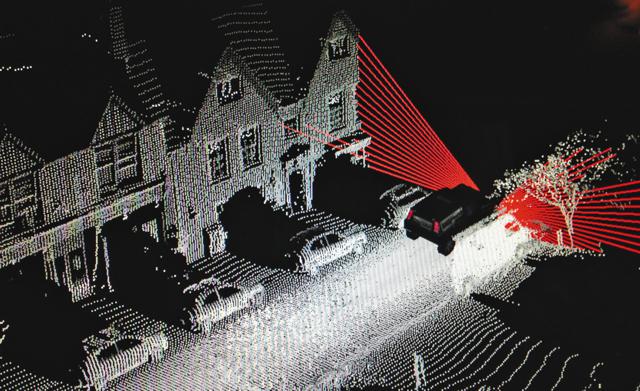 LIDAR: Lo de la foto es un escáner láser. Cuenta con un emisor, un receptor y un espejo que sirve para barrrer el espacio con el láser. Normalmente, existen varios láser superpuestos que barren a lo largo de una sola línea, dando como resultado un patrón de barrido como el de la imagen inferior. Esa imagen está pintada a partir de la información que proporciona el lidar, que es meramente un montón de mediciones puntuales de distancia. Los lidar proporcionan la información en este formato tan práctico, pero según Axel, tienen algun punto débil. El principal es la latencia: a diferencia del radar, que determina simultáneamente distancia y velocidad, el lidar sólo informa de la distancia, y la velocidad se establece comparando mediciones sucesivas. La diferencia, en términos objetivos, consiste en actualizar esa información cada 150 ó 200 milisegundos en lugar de cada 50 milisegundos… pero, según Mercedes, esa diferencia es suficiente para que la suavidad de respuesta de un sistema basado en lidar no sea tan buena como la de uno basado en radar.
LIDAR: Lo de la foto es un escáner láser. Cuenta con un emisor, un receptor y un espejo que sirve para barrrer el espacio con el láser. Normalmente, existen varios láser superpuestos que barren a lo largo de una sola línea, dando como resultado un patrón de barrido como el de la imagen inferior. Esa imagen está pintada a partir de la información que proporciona el lidar, que es meramente un montón de mediciones puntuales de distancia. Los lidar proporcionan la información en este formato tan práctico, pero según Axel, tienen algun punto débil. El principal es la latencia: a diferencia del radar, que determina simultáneamente distancia y velocidad, el lidar sólo informa de la distancia, y la velocidad se establece comparando mediciones sucesivas. La diferencia, en términos objetivos, consiste en actualizar esa información cada 150 ó 200 milisegundos en lugar de cada 50 milisegundos… pero, según Mercedes, esa diferencia es suficiente para que la suavidad de respuesta de un sistema basado en lidar no sea tan buena como la de uno basado en radar.
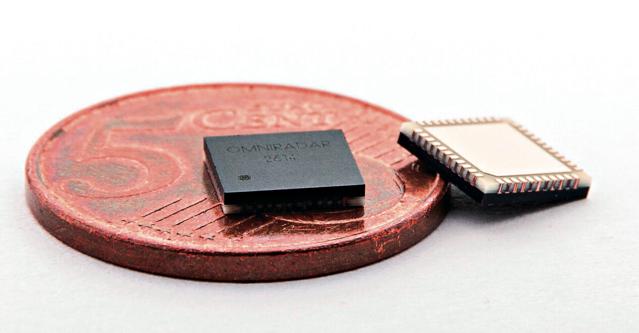
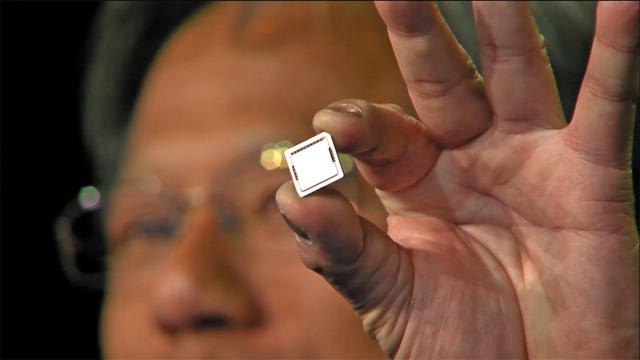
RADAR: Lo de la foto es un radar… pero aún no se comercializa. Se trata del resultado de un proyectollamado RoCC: Radar on Chip for Cars, impulsado, entre otros, por Mercedes. Lo que se ha conseguido –usando una tecnología denominada Si-Ge– es construir un radar completo sobre un chip de silicio. Ahora mismo, los radares son algo más grandes que una cajetilla de tabaco… y salen caros. Al construirlos íntegramente sobre silicio, el tamaño de los radares disminuirá dramáticamente… y su precio, también: se calcula que uno de estos micro-radares puede costar alrededor de 10 euros. Pero eso no es todo: desde hace unos años, los fabricantes alemanes trabajan para habilitar, a nivel mundial, una banda ultra ancha de espectro de radio para aplicaciones automotrices –4 Ghz centrados en 79 Ghz; se espera que esté lista en 2017–. Debido a la tecnología que emplean estos radares –pulso continuo modulado en frencuencia–, su precisión depende del ancho de banda disponible, y esos 4 Ghz significan que podrían tener una resolución casi milmétrica. Además, estos radares son capaces de funcionar en equipo… dando lugar a un radar equivalente mucho más grande y preciso. Esta tecnología, denominada de apertura sintética, permite incluso sacar fotografías de alta resolución empleando radar. ¿Qué tal funcionará un Mercedes con, digamos, 400 radares?
 VISIÓN: Hay una tercera forma de percibir el entorno, y es usar visión artificial. Es complicado, porque el flujo de datos es monumental… un detalle que, como estimar distancias simplemente mirando nos resulta familiar, podemos tender a subestimar. Bertha usa visión artificial mediante cámaras estereoscópicas, aunque en estos momentos lo que ´está de moda´ son las trifocales, que utilizan una cámara principal de alta resolución para captar los detalles y dos auxiliares para registrar la información sobre la profundidad. Además, captar las imágenes no basta: es necesario segmentarlas. La americana Nvidia está haciendo progresos increíbles usando redes neuronales para que sus chips aprendan –literalemente– a detectar lo que hay en una fotografía… viendo centenares de miles de imágenes de las cosas que pueden aparecer en ellas. De momento, en lo que sí están de acuerdo todos los fabricantes es en que, además de visión artificial, hará falta otro sistema redundante que confirme todo lo que vea la cámara.
VISIÓN: Hay una tercera forma de percibir el entorno, y es usar visión artificial. Es complicado, porque el flujo de datos es monumental… un detalle que, como estimar distancias simplemente mirando nos resulta familiar, podemos tender a subestimar. Bertha usa visión artificial mediante cámaras estereoscópicas, aunque en estos momentos lo que ´está de moda´ son las trifocales, que utilizan una cámara principal de alta resolución para captar los detalles y dos auxiliares para registrar la información sobre la profundidad. Además, captar las imágenes no basta: es necesario segmentarlas. La americana Nvidia está haciendo progresos increíbles usando redes neuronales para que sus chips aprendan –literalemente– a detectar lo que hay en una fotografía… viendo centenares de miles de imágenes de las cosas que pueden aparecer en ellas. De momento, en lo que sí están de acuerdo todos los fabricantes es en que, además de visión artificial, hará falta otro sistema redundante que confirme todo lo que vea la cámara.
Mercedes F 015: el concepto
El F 015 explora cómo podría ser el Mercedes autónomo del futuro. Eléctrico, dotado de una gran batalla, un espacioso interior y cuatro butacas giratorias, destila lujo y sofisticación… aunque su interior adolece de un minimalismo y falta de practicidad que le hace poco creíble. Mercedes insiste en que, dentro de 20 años, seguirá habiendo un volante y dos pedales.
O no tan sutiles. Un proyector basado en láser permite al F 015 dibujar pictogramas sobre el suelo. Así puede indicar sus intenciones –por dónde tiene previsto pasar o dónde quiere aparcar–, e incluso poner un paso de peatones virtual a tus pies…

La aportación principal del F 015 es la fórmula de interacción con los peatones. Mercedes ha imaginado cómo podrían establecer los coches autónomos esos sutiles diálogos que permiten, por ejemplo, a la hora de cruzar un paso de peatones, saber si un coche te ha visto. Si es así, en la parrilla se ilumina un punto azul.
Síguenos en redes sociales
Síguenos en nuestras redes X, Facebook, TikTok e Instagram, o en nuestro canal de YouTube donde te ofrecemos contenidos exclusivos. Y si te apuntas a nuestra Newsletter recibirás las noticias más destacadas del motor.
Recibe nuestras noticias más recientes en tu correo
Te enviamos nuestra Newsletter cada semana con contenido destacado


