
Cuando quiera divertirme, entonces conduciré yo», aseguraba el director tecnológico para sistemas electrónicos de Audi, Ricky Hudi, durante el CES –la feria tecnolóigica que se celebra en Las Vegas– del año pasado, mientras explicaba su concepto de eso que se está comenzando a llamar ´conducción asistida´ y de lo que empezaremos a disfrutar dentro de unos pocos años.
 Así piensan
Así piensan
 Así piensan
Así piensanLos académicos parecen estar de acuerdo en que para resolver el problema con éxito, conviene dividirlo en cuatro problemas menos complicados.
1) Planificación: Es el problema más sencillo… o el más convencional. El módulo de planificación computa distintas alternativas para ir de A a B y selecciona una en función del coste –en tiempo– del desplazamiento. Esto los navegadores lo tienen dominado.
2) Generador de comportamiento: Divide el plan original en tareas sencillas, como ´desaparcar´, ´incorporarse a la vía´ o ´esperar un semáforo´. Podría llevar el coche de A a B con éxito si nuestro vehículo fuera el único en el mundo.
3) Generador dinámico: Su misión es conducir el coche con seguridad –es decir, sin chocar contra nada ni contra nadie ni salirse de la carretera– hasta la próxima posición planeada –que no suele estar muy lejos–.
4) Percepción: Resolver este problema es muy complicado. No sólo se trata de detectar a otros vehículos, sino de deducir sus intenciones. ¿Va a parar ese coche en el STOP? ¿Quiere girar ese ciclista? ¿Se ha caído ese peatón?
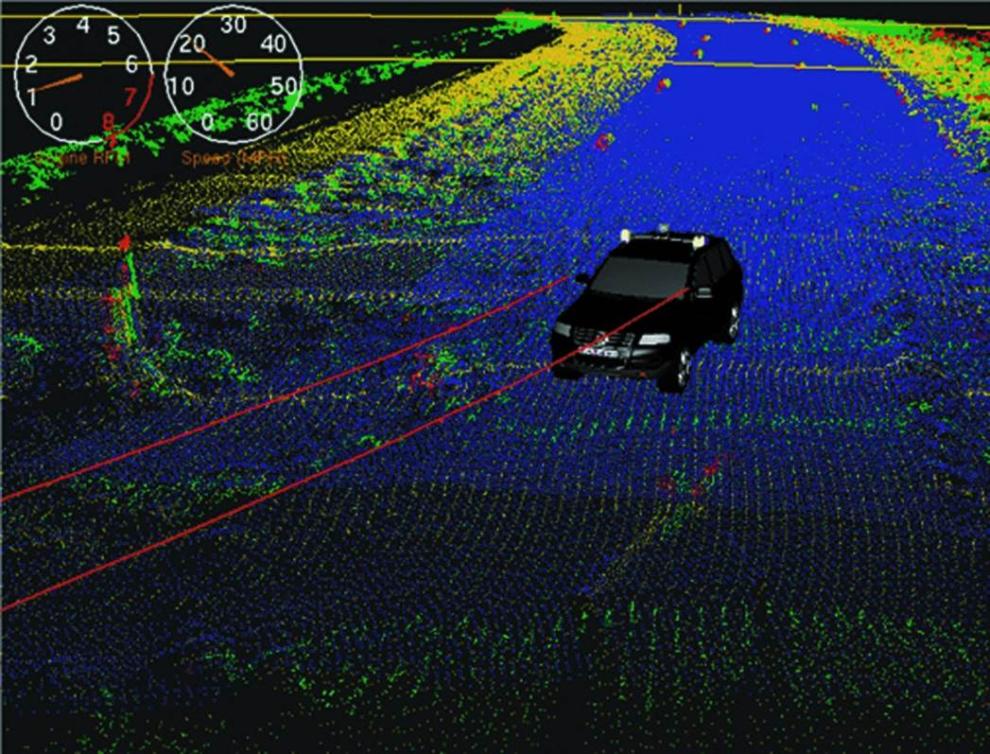
En marcha, un coche autónomo piensa más o menos como un humano… muy prudente. La imagen superior ilustra cómo ve el coche de Google el mundo –es una visión un poco compleja–. El empeño máximo del coche es desmenuzar su comportamiento en pequeños pedazos, y el siguiente movimiento lo representan la franja de rectángulos verdes que tiene delante. Cada vehículo, peatón y ciclista es etiquetado, y se elabora un pronóstico de sus intenciones –potenciales– que se actualiza varias veces por segundo. Los puntitos verdes representan las posiciones futuras.
Sin embargo, el doctor Hudi sólo posterga lo inexorable. En el futuro, se encargarán de conducir las máquinas. Ocurrirá así porque se verifican las dos condiciones que, en el mundo moderno, parecen determinar si algo se hace o no.
El mundo a puntitos
Aunque es un sentido maravilloso, la mejor demostración de que la vista no es un sistema de percepción perfecto es la existencia de magos. El coche autónomo no puede permitirse que le engañen, de forma que confía en su propio sistema de visión: el escáner láser. La teoría es sencilla: un láser emite un pulso de luz de duración muy corta y color perfectamente conocido en una dirección determinada y se mide el tiempo que tarda la luz en rebotar en el obstáculo más próximo y regresar.
Entonces, se mueve un poquito el láser y se vuelve a disparar. El resultado es un retrato puntillista del mundo con muy poca resolución… pero muy fiable. Estos sistemas cuentan con cabezales giratorios y, por su construcción, suelen cubrir un solo plano… aunque poniéndolos en oblicuo, el propio movimiento del vehículo se emplea para barrer todo el espacio, como en una ´foto finish´. Algunos son capaces de barrer varios planos –el Velodyne que emplea Google es capaz de barrer 64– y proporcionan una imagen muy detallada del mundo exterior. La contrapartida es el precio: la cafetera giratoria que monta el Google Car cuesta unos 50.000 euros.
Es posible. Y resultaría rentable. Así que va a dar igual cuánto te resistas o patalees: los accidentes de tráfico representan la primera causa de muerte entre los 18 y los 35 años. Desde el punto de vista económico, eso supone una pérdida de plusvalías del todo intolerable –de en torno a 15.000 millones de euros anuales, en el caso de España–.
De forma que aquellos que lucen esas entretenidas pegatinas de ´la carretera no es un circuito, pero nos apañamos´ están llamados a perder la batalla: son medios productivos.
Pero dejemos a un lado a Marx y centrémonos en la primera condición. ¿Es posible que un coche conduzca solo? Reiteradamente, en los últimos tiempos, los prototipos –primero, de las universidades, y más tarde de las propias marcas– vienen demostrando que sí es posible.
Todo comenzó con el Darpa Challenge de 2004. Darpa, la agencia estadounidense famosa por, entre otras cosas, inventar Internet, quería automatizar los vehículos del ejército norteamericano y creó una carrera por el desierto para coches sin conductor con un premio de un millón de dólares.
Dicen que ´bien está lo que bien acaba´, y si usamos ese calibre, el primer Darpa Challenge fue un fracaso: no sólo no acabó la prueba ningún vehículo sino que sólo logró empezarla uno. Desalentador. Pero, al año siguiente, se repitió la experiencia… y consiguieron acabar cinco coches, que recorrieron 240 km –por pistas forestales, túneles lúgubres y desfiladeros con caídas mortales– en siete horas.
De forma que hacer un coche autónomo era posible. Era también relativamente barato: según David Hall, presidente de Velodyne Systems –creadores del mocho giratorio que luce sobre el techo el coche autónomo más famoso: el Prius de Google–, cuesta unos cuatro millones de dólares.
Sin embargo, no resultaría nada práctico. Ya lo dice el refrán: «Dale a un esquimal un pescado, y comerá un día. Enséñale a pescar, y habrás perdido un cliente». De forma que Google inventó lo que podríamos denominar ´el coche automático´.
Todo el mundo necesita un mapa para orientarse. El asunto, es que un coche automático ni siquiera comprende el plano extremadamente preciso –con una resolución de milímetros– que necesita para orientarse. Armado con ese mapa, el coche puede escanear el entorno y, por un lado, ubicarse con precisión. Y por otro, distinguir lo que es ´decorado´ de lo que son vehículos y peatones. Y por supuesto, con este enfoque la expresión pay as you drive –paga según conduzcas– cobra todo el sentido del mundo.
Utilizando un plano ultradetallado, la fantasía de un coche que conduce solo se vuelve mucho más viable. Tanto que casi todo el mundo tiene uno. Y Google en concreto, tiene varios. De hecho, casi resultaría ´económicamente viable´. En la actualidad, el problema no es la capacidad de proceso: los Darpa Challenge se lograron empleando la primera generación de procesadores Pentium, y Audi asegura que ha conseguido comprimir los cuatro ordenadores que solía utilizar uno de esos coches en una placa del tamaño de un folio Din A4. La cuestión es que para resolver el problema con tan poca capacidad de proceso se requieren sensores láser que está costando abaratar hasta llegar a los presupuestos ridículos –de dos cifras por cada unidad de un componente en el mejor de los casos– con los que se suele trabajar en la industria. Según Velodyne, fabricados en masa, sus escáneres láser más asequibles constarían alrededor de 400 euros. Y de momento, parecen un componente imprescindible: nadie ha conseguido fabricar un prototipo de coche autónomo basado sólo en visión artificial.
En el corto plazo, comenzamos a disfrutar de aperitivos de cómo será ese periodo de transición entre la conducción humana y la conducción autónoma. Coches como el BMW i3 o el Mercedes Clase S usan una fusión de vídeo y radar para hacerse cargo de la dirección y los pedales, aunque el sistema sólo se pueda activar cuando se circula por una autopista, sólo sea operativo entre 0 y 40 km/h… y requiera que el usuario deje una mano sobre el volante.
De hecho, la responsabilidad se perfila como uno de los mayores escoyos que habrá que bordear para que el coche autónomo sea una realidad. Un rodeo que no dependerá ni de la capacidad de proceso, ni de la resolución en píxeles, y que puede plantear problemas difíciles de resolver incluso para un humano. Por ejemplo, supongamos que el coche que circula por el carril contrario, tal vez conducido por un humano distraído, invade el tuyo. Y supongamos que la única alternativa para eludir un choque frontal es invadir la acera. Y supongamos que por esa acera camina un peatón inocente. Recuerda darle al Play en cuanto encuentres la respuesta…
Hall of fame de lo autónomo
Este VW Touareg que circula a toda velocidad sin conductor se llama Stanley. Es el primer coche autónomo de la humanidad, y ganó, en 2005, el segundo Darpa Challenge. Stanley luce cinco escáneres SICK montados en diferentes planos. Su información se emplea para etiquetar cada zona en las imágenes que capta una pequeña cámara. Lo construyó el equipo de la Universidad de Stanford, y es todo un ejemplo de simplicidad.
Tras ganar el segundo desafío Darpa, Sebastian Thrun y parte de su equipo recaló en Google. Ya han creado más de una docena de prototipos –la mayor parte, partiendo de un Toyota Prius–, que han recorrido medio millón de kilómetros sin incidentes. Es también el padre del primer prototipo de coche 100% autónomo de Google –ver página siguiente–. Un coche autónomo puede obtener permiso de circulación en cuatro estados de los EE.UU.
Un poquito de lateral thinking
Aunque BMW tiene su propio Serie 5 autónomo, el modelo que más titulares ha cosechado ha sido este Serie 2 que, con motivo del CES de 2013, paseaba a los periodistas de costado por el trazado del Las Vegas Motor Speedway. Este 235i driftador es una secuela de otro coche ´automático´ de BMW, el 330i Track Trainer de 2011: un Serie 3 capaz de reproducir con exactitud una vuelta que previamente realizaba un piloto humano.
Hall of fame del autónomo
Es el proyecto menos emocionante de todos, pero es el que mayor potencial tiene en el corto plazo. SARTRE consiste en trenes de carretera compuestos de varios coches que siguen automáticamente a un camión que actúa de líder. Una vez incorporados al tren de carretera, los conductores podrían despreocuparse hasta el momento de abandonarlo. SARTRE ha ya realizado pruebas reales en carreteras españolas.
Esta es Shelley, y ha subido solita a Pikes Peak en 27 minutos. Este prototipo, desarrollado entre Audi, la universidad de Stanford y una empresa californiana no es capaz de desenvolverse en el tráfico, pero sí que puede aprenderse un circuito y rodar casi tan rápido como los mejores. Shelley se basa exclusivamente en GPS para ubicarse y conducir, y se suele quedar unos dos segundos por detrás del mejor tiempo de un piloto.
Freir Universität Berlin es una universidad alemana que no sólo ha desarrollado su propio coche autónomo, sino que también está exprimentando con posibles aplicaciones. Ha desarrollado coches teledirigidos por teléfono, un servicio de taxi sin conductor, ha probado a conducir coches con la mirada e, incluso, con el pensamiento…; aunque este último proyecto está aún algo verde para poder llamarlo «conducción telepática»…

Autónomo…
Tartan Racing Boss
Pon dos o tres sensores… Tras ser levemente humillados por Stanley en el segundo desafío Darpa, el equipo Tartan Racing se presentó a la tercera y última edición, el Urban Challenge, con BOSS: un Chevrolet Tahoe sobre el que montaron todos los sensores conocidos por el hombre. Ganaron… aunque Stanford quedó segundo con un VW Passat mucho más sencillo y barato.
Radares de microondas…Los radares de microondas escudriñan una amplia porción del espacio rápidamente y son capaces de seguir varios blancos. Boss emplea radares Ma/Com de corto alcance –procedentes de un Mercedes Clase S– y Continental –empleados por muchas marcas, como BMW–.
Lidar de largo alcance…Estos magníficos Ibeo Alasca XT han sido, durante una década, el estándar en detección a larga distancia, y tienen un alcance de 300 metros. Boss emplea dos porque requiere un doble blanco para confirmar la presencia de un coche.
GPS diferencial…La señal de GPS pública no es muy precisa, pero instalando emisoras adicionales terrestres la precisión puede mejorarse hasta unos cinco centímetros. Además, un sistema giroscópico permitía ubicar a BOSS con una precisión –algo excesiva– de un milímetro.
Y también… dos cámaras de vídeo, un MobilEye –una cámara israelí que reconoce señales y marcas de carril–, un sensor de giro en las ruedas para tener información detallada de la distancia recorrida, tres LIDAR de SICK para controlar el perímetro, un LIDAR de Velodyne en el techo…
…contra automático
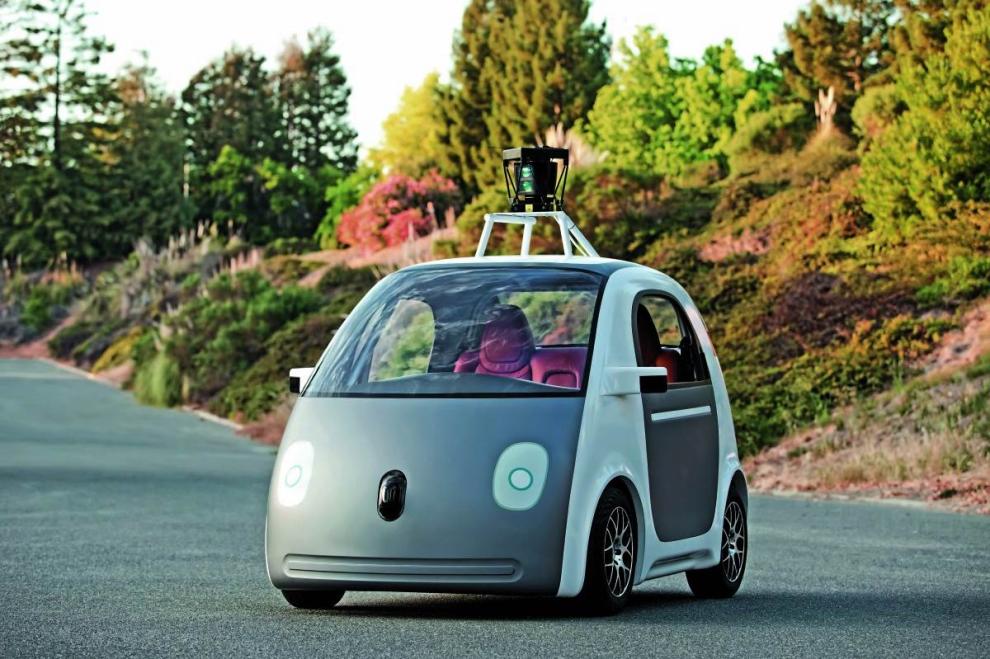
Google Self driving car
Cuando otro se encarga de escudriñar el entorno –y de comprenderlo–, no hacen falta tantos sensores.
El de la derecha, es el primer prototipo de coche autónomo 100% Google. Es eléctrico, y aunque las primeras unidades tienen mandos, prevén fabricar 100 ejemplares dotados tan sólo de un botón ´GO´, otro ´STOP´… y cinturones de seguridad.
LIDAR de medio alcance…Hay cuatro escáneres láser que vigilan el entorno del coche a una altura estratégica. Tienen un alcance de entre 30 y 70 metros… y la última palabra a la hora de determinar, por ejemplo, si el coche puede cruzar un paso de peatones.
En las nubes …La estrategia de Google pasa por confiar en un plano ultra detallado del mundo sobre el que ´ubica´ el coche. Y como es tan detallado, te lo piensan servir –y cobrar– a poquitos según lo necesites. Además, así se aseguran que de no pueda piratearse…
LIDAR Velodyne…Si algo funciona, ¡no lo toques! Y lo cierto es que, aunque resulta muy poco estético, el escáner giratorio de Velodyne ofrece una resolución decente y una rapidez sobresaliente. Otros fabricantes –como BMW y Mercedes– han resuelto el problema confiando más en la fusión de visión artificial, radar, escaner láser y ultrasonidos. Google confía muy poco en la visión artificial –la emplea tan sólo para confirmar señales de tráfico y comprobar los semáforos…– y su mapa indica hasta la altura a la que se sitúa cada una de las luces de cada semáforo…
Síguenos en redes sociales
Síguenos en nuestras redes X, Facebook, TikTok e Instagram, o en nuestro canal de YouTube donde te ofrecemos contenidos exclusivos. Y si te apuntas a nuestra Newsletter recibirás las noticias más destacadas del motor.
Recibe nuestras noticias más recientes en tu correo
Te enviamos nuestra Newsletter cada semana con contenido destacado


