
Por caro o barato que sea, ya se trate de un Tata o un Ferrari, llega un momento en el que, toda la inversión realizada en potencia y tecnología a la hora de desarrollar un coche, debe pasar por el estrecho embudo que representa la interacción que se produce entre esos cuatro pequeños rectángulos de caucho vulcanizado que son las ruedas y el asfalto.
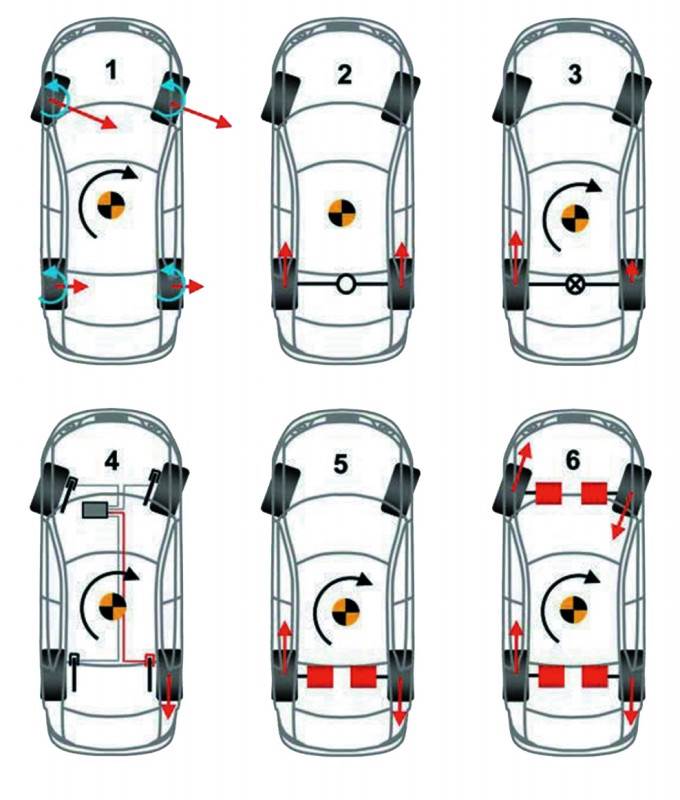
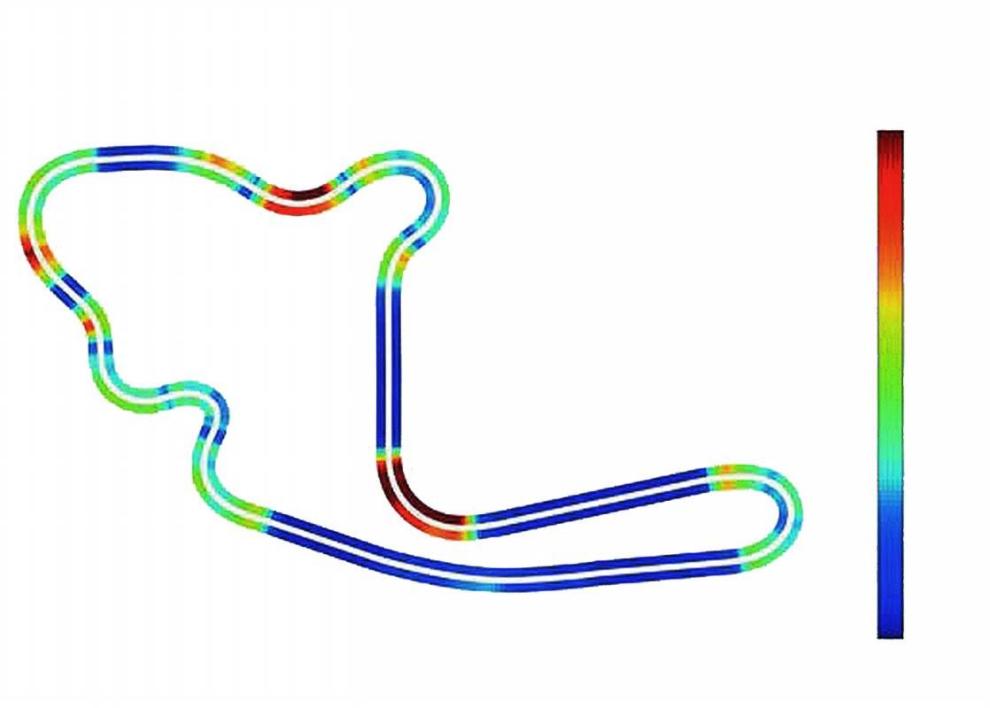
La teoríaCuando un neumático ejerce una fuerza, esta tiene dos efectos sobre el coche: provoca una fuerza similar aplicada sobre su centro de gravedad… y un momento de giro aplicado en torno a su centro de gravedad –la flecha amarilla en el techo del coche de la izquierda–. Suena complicado, peor es muy sencillo… si imaginas que el coche está sobre una pista de hielo, que tiene unas asas atornilladas a las llantas y que te piden que, tú solito, lo hagas avanzar. En cuanto tires de una de las asas verás que el coche avanza… y se tuerce hacia el lado contrario. Enhorabuena… eso es torque vectoring. El torque vectoring es interesante porque, como mecanismo para inducir un cambio de dirección en la trayectoria de un coche, no tiene rival. La gráfica inferior –que, al igual que las otras que acompañan a estas páginas, procede de un estudio sobre el potencial de la vectorización del par realizado por la firma norteamericana especializada en simulación Optimumg y publicado en la revista Vehicle Dynamics International– compara el efecto positivo que tienen, en el par máximo de guiñada –giro en torno al eje vertical–, los tres recursos clásicos a la hora de mejorar la agilidad de un coche y el torque vectoring. |
Desde el punto de vista de la física, todo se reduce a ocho fuerzas y cuatro momentos aplicados sobre el centro de gravedad del vehículo, pero esas magnitudes determinan cosas tan mesurables como las prestaciones y tan etéreas como el tacto. Y basta alterarlas levemente para hacer que un vehículo anodino resulte mágico.
La ciencia de lo posible
|
Los ingenieros de dinámica de vehículos comenzaron a jugar con el concepto de control vectorial de par o torque vectoring hace más de 25 años, a raíz de la introducción de los primeros controles electrónicos de estabilidad. A día de hoy, el ESP ha demostrado que es capaz de hacer cosas asombrosas. Gracias a él, actualmente una cantidad apreciable de conductores simplemente desconoce en qué consiste eso que llaman sobreviraje.
¿Sería igual de interesante ser capaces de acelerar selectivamente las cuatro ruedas? Efectivamente. De hecho, es algo que se lleva tratando de hacer desde hace mucho tiempo… si bien, hasta ahora, el empleo de un solo motor para mover las cuatro ruedas ha limitado el grado de ‘selectividad’ disponible.
Los límites de la ideaLa gráfica de la derecha ilustra cuánto par de guiñada adicional puede conseguirse mediante un vector de par –una diferencia en el par que se proporciona a las ruedas– en el eje delantero y el eje trasero. Lo primero que vemos es que el par adicional generado puede ser sobrevirador o subvirador en idéntica medida –el ESP no es capaz de esto–. Lo segundo, es que el tren trasero tiene más potencial a la hora de modificar la trayectoria mediante torque vectoring. La explicación a este fenómeno es sencilla: al aplicar más par a una rueda, reducimos su capacidad para proporcionar adherencia transversal. En el tren trasero, eso provoca que el coche ‘se vaya de detrás’, y en el delantero, que ‘se vaya de delante’. De igual manera, aunque en menor medida, el tren trasero no es tan ‘capaz’ de proporcionar subviraje como el delantero.
|
El ESP compensa un funcionamiento relativamente torpe –al fin y al cabo, sólo sabe poner y quitar presión de frenos– con una lógica de control clara y una velocidad de proceso diabólica, que le permite tomar una decisión por cada centímetro que avanza el coche. Por su parte, los dispositivos mecánicos de vectorización del par o torque vectoring no son en absoluto digitales, sino que recurren a trucos que podrían calificarse directamente de hechicería. Y de hecho, la ciencia en la que basan su funcionamiento tanto los diferenciales autoblocantes del STI como el embrague de acoplamiento Haldex V del Audi S3 tiene un nombre parecido: el campo de la física que estudia la interacción entre materiales en movimiento relativo se llama tribología.
Nadie es perfecto
|

Una consecuencia de su sofisticación –es decir, de su falta de torpeza– es un coste bastante elevado. Y una consecuencia de la hechicería es que el conductor debe suplementar con su intuición, pericia y valor la falta de precisión digital de la que adolecen. Pero, cuando lo hace, el funcionamiento de coches como el STI realmente parece cosa de brujas.
¿Para cuándo un coche con un ‘control electrónico de par’ que extienda la magia del ESP a la parte de la conducción durante la que estamos acelerando? Eso ya existe. Y su comportamiento, bordea la ciencia-ficción. Pero aún tiene un coste elevado. Es un capítulo de la historia del automóvil que ha empezado a escribir Mercedes, con el SLS AMG Electric Drive de aquí debajo… y sus cuatro motores eléctricos controlados individualmente.
SUBARU IMPREZA STI
Con un sistema de tracción total permanente a las cuatro ruedas, un diferencial central de bloqueo variable y sendos autoblocantes delantero y trasero, el sistema de tracción del STI es un festival de complejidad. |
Detrás, el Subaru WRX STI emplea un autoblocante Torsen. Este tipo de diferencial envía más par a la rueda que más resistencia opone al giro. En curva, esa es la rueda exterior, ya que es sobre la que descansa más peso –debido a la transferencia de masa que provoca la aceleración lateral–. De esta forma, siempre que estemos acelerando en curva, se genera un primer efecto vector.
Delante, emplea un autoblocante LSD que funciona limitando la diferencia de velocidad de giro entre las ruedas delanteras. Mientras la diferencia sea razonablemente pequeña, la presencia del LSD no afecta al tacto de dirección. Y cuando se acelera con decisión, el LSD impide que la rueda interior delantera patine, lo que en la práctica se traduce en par extra disponible para la rueda exterior… creando otro vector.
La geometría del diferencial central genera un reparto de par 41/59 que favorece al tren trasero –crea un tercer vector–, pero incorpora un mecanismo de bloqueo controlado electrónicamente. Este bloqueo puede ajustarse manualmente –en seis niveles– o dejarlo a cargo del coche. Incluso en ese caso, podemos elegir entre un programa muy estable –AUTO Plus– u otro que maximiza la agilidad –AUTO Minus–.

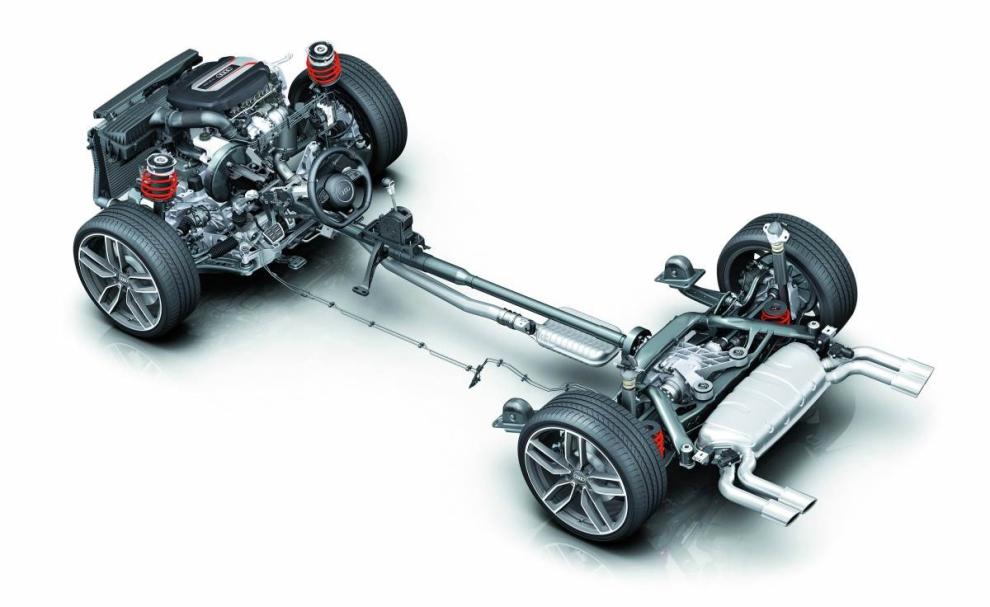
AUDI S3 SEDÁN
En el sistema Haldex V del S3 no existe un diferencial central propiamente dicho. El tren trasero se acopla al delantero mediante un embrague multidisco de accionamiento electrohidráulico. |
A pesar de la denominación Quattro, el Audi A3 tiene poco que ver con la tracción total que montan las berlinas de motor longitudinal de Audi. El S3 usa un sistema rely-on con un acoplamiento Haldex V montado sobre el puente trasero. Se trata de un sistema electrohidráulico, siendo los componentes clave la bomba y el embrague multidisco en aceite.
Cuando se cierra a máxima presión, el Haldex V es capaz de transmitir más de 2.500 Nm de par –hay que tener en cuenta que nos encontramos ‘aguas abajo’ de la caja de cambios, y el par que llega por el eje cardán es el del motor multiplicado por la relación de transmisión.
En seco y sobre asfalto adherente, el sistema pasa casi todo el tiempo desconectado.
El embrague se cierra cada vez que se detiene el coche, de forma que siempre se arranca en ‘tracción total’. Y siempre está abierto a alta velocidad –para favorecer la estabilidad– y cuando se pisa el freno –para facilitar el trabajo del ABS–. En mojado y con baja adherencia, el funcionamiento siempre es sutil y discreto, y hay que concentrarse mucho para percibir su funcionamiento. Es, en ese sentido, todo lo contrario que el controvertido Subaru.
Síguenos en redes sociales
Síguenos en nuestras redes X, Facebook, TikTok e Instagram, o en nuestro canal de YouTube donde te ofrecemos contenidos exclusivos. Y si te apuntas a nuestra Newsletter recibirás las noticias más destacadas del motor.
Recibe nuestras noticias más recientes en tu correo
Te enviamos nuestra Newsletter cada semana con contenido destacado


